
Vehicle Standard (Australian Design Rule 72/0072/00 – Dynamic Side Impact Occupant ProtectionDynamic Side Impact Occupant Protection) 20052005
I, JAMES ERIC LLOYD, Minister for Local Government, Territories and Roads, determine this vehicle standard under subsection 7 (1) of the Motor Vehicle Standards Act 1989.
Dated 29th November 2005
[SIGNED]
James Eric Lloyd
Minister for Local Government, Territories and Roads
CONTENTS
1. Legislative provisions.............................................
1.1 NAME OF STANDARD...........................................
1.2 COMMENCEMENT..............................................
1.3 REPEAL.......................................................
2. SCOPE.........................................................
3. APPLICABILITY AND IMPLeMENTATION.........................
4. DEFINITIONS...................................................
5. REQUIREMENTS................................................
6. ALTERNATIVE STANDARDS.....................................
APPENDIX A..........................................................
1. Legislative provisions
1.1 NAME OF STANDARD
1.1.1 This Standard is the Vehicle Standard (Australian Design Rule 72/00 – Dynamic Side Impact Occupant Protection) 2005.
1.1.2 This Standard may also be cited as Australian Design Rule 72/00 — Dynamic Side Impact Occupant Protection.
1.2 COMMENCEMENT
1.2.1 This Standard commences on the day after it is registered.
1.3 REPEAL
1.3.1 This Standard repeals each vehicle standard with the name Australian Design Rule 72/00 — Dynamic Side Impact Occupant Protection that is:
(a) made under section 7 of the Motor Vehicles Standard Act 1989; and
(b) in force at the commencement of this Standard.
1.3.2 This Standard also repeals each instrument made under section 7 of the Motor Vehicles Standard Act 1989 that creates a vehicle standard with the name Australian Design Rule 72/00 — Dynamic Side Impact Occupant Protection, if there are no other vehicle standards created by that instrument, or amendments to vehicle standards made by that instrument, that are still in force at the commencement of this Standard.
2. SCOPE
The function of this vehicle standard is to specify crash worthiness requirements in terms of forces and accelerations measured by anthropomorphic dummies so as to minimise the likelihood of injury to the occupants in side impact.
3. APPLICABILITY AND IMPLeMENTATION
3.1. Applicability Summary
3.1.1. This ADR applies to the design and construction of vehicles as required by clauses 3.1.2 and 3.1.3 and set out in clause 3.2.
3.1.2. This rule is binding:
a) from 1 January 1999 on all new model MA vehicles; and
b) from 1 January 2004 on all MA vehicles.
c) from 1 January 2000 on all new model MB and MC vehicles; and
d) from 1 January 2004 on all MB, MC vehicles.
e) from 1 July 2000 on all new model NA vehicles; and
f) from 1 July 2005 on all NA vehicles.
3.1.3. For the purposes of clause 3.1.2, a “new model” is a vehicle model first produced with a ‘date of Manufacture’ on or after 1 January 1999.
3.2. Applicability Table
Vehicle Category | ADR Category Code | UNECE Category Code | Manufactured on or After | Acceptable Prior Rules |
Moped 2 wheels | LA | L1 | N/A | |
Moped 3 wheels | LB | L2 | N/A | |
Motor cycle | LC | L3 | N/A | |
Motor cycle and sidecar | LD | L4 | N/A | |
Motor tricycle | LE | L5 | N/A | |
Passenger car | MA | M1 | 1 Jan 1999* | |
Forward-control passenger vehicle | MB | M1 | 1 Jan 2000* | |
Off-road passenger vehicle | MC | M1 | 1 Jan 2000* | |
Light omnibus | MD | M2 | N/A | |
Heavy omnibus | ME | M3 | N/A | |
Light goods vehicle | NA | N1 | 1 July 1999* | |
Medium goods vehicle | NB | N2 | N/A | |
Heavy goods vehicle | NC | N3 | N/A | |
Very light trailer | TA | O1 | N/A | |
Light trailer | TB | O2 | N/A | |
Medium trailer | TC | O3 | N/A | |
Heavy trailer | TD | O4 | N/A | |
* see clauses 3.1.2 and 3.1.3
4. DEFINITIONS
Refer to Vehicle Standard (Australian Design Rule Definitions and Vehicle Categories) 2005.
5. REQUIREMENTS
5.1. Vehicles must comply with the technical requirements for ECE R 95/01 - “UNIFORM PROVISIONS CONCERNING THE APPROVAL OF VEHICLES WITH REGARD TO THE PROTECTION OF THE OCCUPANTS IN THE EVENT OF A LATERAL COLLISION” entered into force on 12 August 1998.
5.2. Appendix A is an extract from ECE R 95 - “UNIFORM PROVISIONS CONCERNING THE APPROVAL OF VEHICLES WITH REGARD TO THE PROTECTION OF THE OCCUPANTS IN THE EVENT OF A LATERAL COLLISION”. The document has had administrative provisions not relevant to this national standard either deleted or struck out. In the case of deletion of whole parts or annexes, that part will have the words “[NOT APPLICABLE]” placed beside its title.
5.3. The transitional provisions in section 10 of Appendix A do not apply for the purpose of this rule.
5.3.1. In clause 5.2.1.2. of Appendix A the date of introduction of the Viscous Criterion will be 1 January 2001.
6. ALTERNATIVE STANDARDS
6.1. The technical requirements of S5 to S7 of FMVSS 214 - 35 F.R. 16801, October 30 1970 “Side Door Strength - Passenger Cars” as amended by FMVSS 214 - 58 F.R. 14169 are deemed to be equivalent to the technical requirements of this national standard.
6.2. The technical requirements of any of the editions of United Nations –Economic Commission for Europe (UN ECE) Regulation No. 95 UNIFORM PROVISIONS CONCERNING THE APPPROVAL OF VEHICLES WITH REGARD TO THE PROTECTION OF THE OCCUPANTS IN THE EVENT OF A LATERAL COLLISION, up to and including the edition incorporating the 02 series of amendments are deemed to be equivalent to the technical requirements of this national standard.
APPENDIX A
NOTE: This ECE United Nations Document has been edited by deletion of full sections not applicable to the ADR.
E/ECE/324
E/ECE/TRANS/505} Rev.1 /Add.94
E/ECE/TRANS/WP.29/606
12 December 1997
AGREEMENT
CONCERNING THE ADOPTION OF UNIFORM CONDITIONS OF APPROVAL
AND RECIPROCAL RECOGNITION OF APPROVAL
FOR MOTOR VEHICLE EQUIPMENT AND PARTS
done at Geneva on 20 March 1958
Addendum 94: Regulation No. 95/01
The 01 series of amendments entered into force: 12 August 1998
Incorporating
Correction referred to in the depositary notification C.N.213.1995. TREATIES-42
UNIFORM PROVISIONS CONCERNING THE APPROVAL OF VEHICLES WITH REGARD TO
THE PROTECTION OF THE OCCUPANTS IN THE EVENT OF A LATERAL COLLISION
___________

UNITED NATIONS
Regulation No. 95
UNIFORM PROVISIONS CONCERNING THE APPROVAL OF VEHICLES WITH REGARD TO THE PROTECTION OF THE OCCUPANTS IN THE EVENT OF A LATERAL. COLLISION
CONTENTS
REGULATION
1. Scope
2. Definitions
3. Application for approval [Not Applicable]
4. Approval [Not Applicable]
5. Specifications and tests
6. Modification of the vehicle type [Not Applicable]
7. Conformity of production [Not Applicable]
8. Penalties for non-conformity of production [Not Applicable]
9. Production definitely discontinued [Not Applicable]
10. Transitional provisions
11. Names and addresses of technical services responsible for conducting approval tests,
and of administrative departments [Not Applicable]
ANNEXES
Annex 1 - Communication concerning the approval or extension or refusal or withdrawal of
approval or production definitely discontinued of a vehicle type with regard to
protection of occupants in the event of a lateral collision, pursuant to Regulation No. 95[Not Applicable]
Annex 2 - Arrangements of the approval mark [Not Applicable]
Annex 3 - Procedure for determining the “H” point and the actual torso angle for seating positions in motor vehicles
Appendix 1 - Description of the three dimensional “H” point machine (3-D H machine)
Appendix 2 - Three dimensional reference system
Appendix 3 - Reference data concerning seating positions
Annex 4 - Collision test procedure
Appendix 1 - Determination of performance data
Appendix 2 - The procedure for calculating the viscous criterion for EUROSID 1
Annex 5 - Mobile deformable barrier characteristics
Appendix- Examination of the mobile deformable barrier
Annex 6 - Technical description of the side impact dummy
Annex 7 - Installation of the side impact dummy
Annex 8 - Partial test [Not Applicable]
1. SCOPE
This Regulation applies to the lateral collision behaviour of the structure of the passenger compartment of Ml and Nl categories of vehicles where the R point of the lowest seat is not more than 700 mm from ground level when the vehicle is in the condition corresponding to the reference mass defined in paragraph 2.10. of this Regulation.
2. DEFINITIONS
For the purposes of this Regulation:
2.1. “Approval of a vehicle” means the approval of a vehicle type with regard to the behaviour of the structure of the passenger compartment in a lateral collision;
2.2. “Vehicle type” means a category of power-driven vehicles which do not differ in such essential respects as:
2.2.1. the length, width and ground clearance of the vehicle, in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.2. the structure, dimensions, lines and materials of the side walls of the passenger compartment in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.3. the lines and inside dimensions of the passenger compartment and the type of protective systems, in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.4. the sitting of the engine (front, rear or centre);
2.2.5. the unladen mass, in so far as there is a negative effect on the performance prescribed in this Regulation;
2.2.6. the optional arrangements or interior fittings in so far as they have a negative effect on the performance prescribed in this Regulation;
2.2.7. the type of front seat(s) and position of the “R” point in so far as they have a negative effect on the performance prescribed in this Regulation;
2.3. “Passenger compartment” means the space for occupant accommodation, bounded by the roof, floor, side walls, doors, outside glazing and front bulkhead and the plane of the rear compartment bulkhead or the plane of the rear-seat back support;
2.4. “R point” or “seating reference point” means the reference point specified by the vehicle manufacturer which:
2.4.1. has co-ordinates determined in relation to the vehicle structure;
2.4.2. corresponds to the theoretical position of the point of torso/thighs rotation (H point) for the lowest and most rearward normal driving position or position of use given by the vehicle manufacturer for each seating position specified by him;
2.5. “H point” is as established by annex 3 to this Regulation;
2.6. “Capacity of the fuel tank” means the fuel-tank capacity as specified by the manufacturer of the vehicle;
2.7. “Transverse plane” means a vertical plane perpendicular to the median longitudinal vertical plane of the vehicle;
2.8. “Protective system” means devices intended to restrain and/or protect the occupants;
2.9. “Type of protective system” means a category of protective devices which do not differ in such essential respects as their:
technology
geometry
constituent materials;
2.10. “Reference mass” means the unladen mass of the vehicle increased by a mass of 100 kg (that is the mass of the side impact dummy and its instrumentation);
2.11. “Unladen mass” means the mass of the vehicle in running order without driver, passengers or load, but with the fuel tank filled to 90 per cent of its capacity and the usual set of tools and spare wheel on board, where applicable;
2.12. “Mobile deformable barrier” means the apparatus with which the test vehicle is impacted. It consists of a trolley and an impactor;
2.13. “Impactor” means a crushable section mounted on the front of mobile deformable barrier;
2.14. “Trolley” means a wheeled frame free to travel along its longitudinal axis at the point of impact. Its front supports the impactor.
3. APPLICATION FOR APPROVAL [NOT APPLICABLE]
4. APPROVAL [NOT APPLICABLE]
5. SPECIFICATIONS AND TESTS
5.1. The vehicle shall undergo a test in accordance with annex 4 to this Regulation.
5.1.1. The test will be carried out on the driver’s side unless asymmetric side structures, if any, are so different as to affect the performance in a side impact. In that case either of the alternatives in paragraph 5.1.1.1. or 5.1.1.2. may be used by agreement between the manufacturer and test authority.
5.1.1.1. The manufacturer will provide the authority responsible for approval with information regarding the compatibility of performances in comparison with the driver’s side when the test is being carried out on that side.
5.1.1.2. The approval authority, if concerned as to the construction of the vehicle, will decide to have the test performed on the side opposite the driver, this being considered the least favourable.
5.1.2. The Technical Service, after consultation with the manufacturer, may require the test to be carried out with the seat in a position other than the one indicated in paragraph 5.5.1 of annex 4. This position shall be indicated in the test report. /
5.1.3. The result of this test shall be considered satisfactory if the conditions set out in paragraphs 5.2. and 5.3. below are satisfied.
5.2. Performance criteria
5.2.1. The performance criteria, as determined for the collision test in accordance with the appendix to annex 4 to this Regulation shall meet the following conditions:
5.2.1.1. the head performance criterion (HPC) shall be less than or equal to 1,000; when there is no head contact, then the HPC shall not be measured or calculated but recorded as “No Head Contact.”
5.2.1.2. the thorax performance criteria shall be:
(a) Rib Deflection Criterion (RDC) less than or equal to 42 mm;
(b) Soft Tissue Criterion (VC) less or equal to 1.0 m/sec.
For a transitional period of two years after the date specified in paragraph 10.2. of this Regulation the V * C value is not a pass/fail criterion for the approval testing, but this value has to be recorded in the test report and to be collected by the approval authorities. After this transitional period, the VC value of 1.0 m/sec shall apply as a pass/fail criterion unless the Contracting Parties applying this Regulation decide otherwise.
5.2.1.3. the pelvis performance criterion shall be:
Pubic Symphysis Peak Force (PSPF) less than or equal to 6 kN.
5.2.1.4. the abdomen performance criterion shall be:
Abdominal Peak Force (APF) less than or equal to 2.5 kN internal force (equivalent to external force of 4.5 kN).
5.3. Particular requirements
5.3.1. No door shall open during the test.
5.3.2. After the impact, it shall be possible without the use of tools to:
5.3.2.1. open a sufficient number of doors provided for normal entry and exit of passengers, and if necessary tilt the seat-backs or seats to allow evacuation of all occupants;
5.3.2.2. release the dummy from the protective system;
5.3.2.3. remove the dummy from the vehicle;
5.3.3. no interior device or component shall become detached in such a way as noticeably to increase the risk of injury from sharp projections or jagged edges;
5.3.4. ruptures, resulting from permanent deformation are acceptable, provided these do not increase the risk of injury;
5.3.5. if there is continuous leakage of liquid from the fuel-feed installation after the collision, the rate of leakage shall not exceed 30 g/min; if the liquid from the fuel-feed system mixes with liquids from the other systems and the various liquids cannot easily be separated and identified, all the liquids collected shall be taken into account in evaluating the continuous leakage.
6. MODIFICATION OF THE VEHICLE TYPE [NOT APPLICABLE]
7. CONFORMITY OF PRODUCTION [NOT APPLICABLE]
8. PENALTIES FOR NON-CONFORMITY OF PRODUCTION [NOT APPLICABLE]
9. PRODUCTION DEFINITELY DISCONTINUED [NOT APPLICABLE]
10. TRANSITIONAL PROVISIONS
10.1. as from the official date of entry into force of the 01 series of amendments no Contracting Party applying this
Regulation shall refuse to grant ECE approval under this Regulation as amended by the 01 series of
amendments.
10.2. as from 1 October 1998, Contracting Parties applying this Regulation shall grant ECE approvals only to those types of vehicles which comply with the requirements of this Regulation as amended by the 01 series of amendments.
10.3 as from 1 October 2003 Contracting Parties applying this Regulation may refuse first national registration (first entry into service) of vehicles which do not meet the requirements of this Regulation as amended by the 01 series of amendments.
11. NAMES AND ADDRESSES OF TECHNICAL SERVICES
RESPONSIBLE FOR CONDUCTING APPROVAL TESTS,
AND OF ADMINISTRATIVE DEPARTMENTS [NOT APPLICABLE]
Annex 3
PROCEDURE FOR DETERMINING THE “H” POINT AND THE ACTUAL
TORSO ANGLE FOR SEATING POSITIONS IN MOTOR VEHICLES
1. PURPOSE
The procedure described in this annex is used to establish the “H” point location and the actual torso angle for one or several seating positions in a motor vehicle and to verify the relationship of measured data to design specifications given by the vehicle manufacturer.
2. DEFINITIONS
For the purposes of this annex:
2.1. “Reference data” means one or several of the following characteristics of a seating position:
2.1.1. the “H” point and the “R” point and their relationship,
2.1.2. the actual torso angle and the design torso angle and their relationship.
2.2. “Three-dimensional ‘H’ Point machine” (3-D H machine) means the device used for the determination of “H” points and actual torso angles. This device is described in appendix 1 to this annex;
2.3. “ ‘H’ point” means the pivot centre of the torso and the thigh of the 3-D H machine installed in the vehicle seat in accordance with paragraph 4 below. The “H" point is located in the centre of the centreline of the device which is between the “H” point sight buttons on either side of the 3-D H machine. The “H” point corresponds theoretically to the “R” point (for tolerances see paragraph 3.2.2. below). Once determined in accordance with the procedure described in paragraph 4, the “H” point is considered fixed in relation to the seat-cushion structure and to move with it when the seat is adjusted;
2.4. “ ‘R’ point” or “seating reference point” means a design point defined by the vehicle manufacturer for each seating position and established with respect to the three-dimensional reference system;
2.5. “Torso-line” means the centreline of the probe of the 3-D H machine with the probe in the fully rearward position;
2.6. “Actual torso angle” means the angle measured between a vertical line through the “H” point and the torso line using the back angle quadrant on the 3-D H machine. The actual torso angle corresponds theoretically to the design torso angle (for tolerances see paragraph 3.2.2. below):
2.7. “Design torso angle” means the angle measured between a vertical line through the “R” point and the torso line in a position which corresponds to the design position of the seat-back established by the vehicle manufacturer;
2.8. “Centreplane of occupant” (C/LO) means the median plane of the 3-D H machine positioned in each designated seating position; it is represented by the co-ordinate of the “H” point on the “Y” axis. For individual seats, the centreplane of the seat coincides with the centreplane of the occupant. For other seats, the centreplane of the occupant is specified by the manufacturer;
2.9. “Three-dimensional reference system” means a system as described in appendix 2 to this annex;
2.10. “Fiducial marks” are physical points (holes, surfaces, marks or indentations) on the vehicle body as defined by the manufacturer;
2.11. “Vehicle measuring attitude” means the position of the vehicle as defined by the co-ordinates of fiducial marks in the three-dimensional reference system.
3. REQUIREMENTS
3.1. Data presentation
For each seating position where reference data are required in order to demonstrate compliance with the provisions of the present Regulation, all or an appropriate selection of the following data shall be presented in the form indicated in appendix 3 to this annex:
3.1.1. the co-ordinates of the “R” point relative to the three-dimensional reference system;
3.1.2. the design torso angle;
3.1.3. all indications necessary to adjust the seat (if it is adjustable) to the measuring position set out in paragraph 4.3. below.
3.2. Relationship between measured data and design specifications
3.2.1. The co-ordinates of the “H” point and the value of the actual torso angle obtained by the procedure set out in paragraph 4. below shall be compared, respectively, with the co-ordinates of the “R” point and the value of the design torso angle indicated by the vehicle manufacturer.
3.2.2. The relative positions of the “R” point and the “H” point and the relationship between the design torso angle and the actual torso angle shall be considered satisfactory for the seating position in question if the “H” point, as defined by its co-ordinates, lies within a square of 50 mm side length with horizontal and vertical sides whose diagonals intersect at the “R” point, and if the actual torso angle is within 5° of the design torso angle.
3.2.3. If these conditions are met, the “R” point and the design torso angle, shall be used to demonstrate compliance with the provisions of this Regulation.
3.2.4. If the “H” point or the actual torso angle does not satisfy the requirements of paragraph 3.2.2. above, the “H” point and the actual torso angle shall be determined twice more (three times in all). If the results of two of these three operations satisfy the requirements, the conditions of paragraph 3.2.3. above shall apply.
3.2.5. If the results of at least two of the three operations described in paragraph 3.2.4. above do not satisfy the requirements of paragraph 3.2.2. above, or if the verification cannot take place because the vehicle manufacturer has failed to supply information regarding the position of the “R” point or regarding the design torso angle, the centroid of the three measured points or the average of the three measured angles shall be used and be regarded as applicable in all cases where the “R” point or the design torso angle is referred to in this Regulation.
4. PROCEDURE FOR “H” POINT AND ACTUAL TORSO ANGLE DETERMINATION
4.1. The vehicle shall be preconditioned at the manufacturer’s discretion, at a temperature of 20 10°C to ensure that the seat material reached room temperature. If the seat to be checked has never been sat upon, a 70 to 80 kg person or device shall sit on the seat twice for one minute to flex the cushion and back. At the manufacturer’s request, all seat assemblies shall remain unloaded for a minimum period of 30 min prior to installation of the 3-D H machine.
4.2. The vehicle shall be at the measuring attitude defined in paragraph 2.11. above.
4.3. The seat, if it is adjustable, shall be adjusted first to the rearmost normal driving or riding position, as indicated by the vehicle manufacturer, taking into consideration only the longitudinal adjustment of the seat, excluding seat travel used for purposes other than normal driving or riding positions. Where other modes of seat adjustment exist (vertical, angular, seat-back, etc.) these will then be adjusted to the position specified by the vehicle manufacturer. For suspension seats, the vertical position shall be rigidly fixed corresponding to a normal driving position as specified by the manufacturer.
4.4. The area of the seating position contacted by the 3-D H machine shall be covered by a muslin cotton, of sufficient size and appropriate texture, described as a plain cotton fabric having 18.9 threads per cm2 and weighing 0.228 kg/m2 or knitted or non- woven fabric having equivalent characteristics. If the test is run on a seat outside the vehicle, the floor on which the seat is placed shall have the same essential characteristics as the floor of the vehicle in which the seat is intended to be used.
4.5. Place the seat and back assembly of the 3-D H machine so that the centreplane of the occupant (C/LO) coincides with the centreplane of the 3-D H machine. At the manufacturer’s request, the 3-D H machine may be moved inboard with respect to the C/LO if the 3-D H machine is located so far outboard that the seat edge will not permit levelling of the 3-D H machine.
4.6. Attach the foot and lower leg assemblies to the seat pan assembly, either individually or by using the T-bar and lower leg assembly. A line through the “H” point sight buttons shall be parallel to the ground and perpendicular to the longitudinal centreplane of the seat.
4.7. Adjust the feet and leg positions of the 3-D H machine as follows:
4.7.1. Designated seating position: driver and outside front passenger
4.7.1.1. Both feet and leg assemblies shall be moved forward in such a way that the feet take up natural positions on the floor, between the operating pedals if necessary. Where possible the left foot shall be located approximately the same distance to the left of the centreplane of the 3-D H machine as the right foot is to the right. The spirit level verifying the transverse orientation of the 3-D H machine is brought to the horizontal by readjustment of the seat pan if necessary, or by adjusting the leg and foot assemblies towards the rear. The line passing through the “H” point sight buttons shall be maintained perpendicular to the longitudinal centreplane of the seat.
4.7.1.2. If the left leg cannot be kept parallel to the right leg and the left foot cannot be supported by the structure, move the left foot until it is supported. The alignment of the sight buttons shall be maintained.
4.7.2. Designated seating position: outboard rear
For rear seats or auxiliary seats, the legs are located as specified by the manufacturer. If the feet then rest on parts of the floor which are at different levels, the foot which first comes into contact with the front seat shall serve as a reference and the other foot shall be so arranged that the spirit level giving the transverse orientation of the seat of the device indicates the horizontal.
4.7.3. Other designated seating positions:
The general procedure indicated in paragraph 4.7.1. above shall be followed except that the feet shall be placed as specified by the vehicle manufacturer.
4.8. Apply lower leg and thigh weights and level the 3-D H machine.
4.9. Tilt the back pan forward against the forward stop and draw the 3-D H machine away from the seat-back using the T-bar. Reposition the 3-D H machine on the seat by one of the following methods:
4.9.1. If the 3-D H machine tends to slide rearward, use the following procedure. Allow the 3-D H machine to slide rearward until a forward horizontal restraining load on the T-bar is no longer required i.e. until the seat pan contacts the seat-back. If necessary, reposition the lower leg.
4.9.2. If the 3-D H machine does not tend to slide rearward, use the following procedure. Slide the 3-D H machine rearwards by applying a horizontal rearward load to the T-bar until the seat pan contacts the seat-back (see figure 2 of appendix 1 to this annex).
4.10. Apply a 100 ± 10 N load to the back and pan assembly of the 3-D H machine at the intersection of the hip angle quadrant and the T-bar housing. The direction of load application shall be maintained along a line passing by the above intersection to a point just above the thigh bar housing (see figure 2 of appendix 1 to this annex). Then carefully return the back pan to the seat- back. Care must be exercised throughout the remainder of the procedure to prevent the 3-D H machine from sliding forward.
4.11. Install the right and left buttock weights and then, alternately, the eight torso weights.
Maintain the 3-D H machine level.
4.12. Tilt the back pan forward to release the tension on the seat-back. Rock the 3-D H machine from side to side through a 10° arc (5° to each side of the vertical centreplane) for three complete cycles to release any accumulated friction between the 3-D H machine and the seat.
During the rocking action, the T-bar of the 3-D H machine may tend to diverge from the specified horizontal and vertical alignment. The T-bar must therefore be restrained by applying an appropriate lateral load during the rocking motions. Care shall be exercised in holding the T-bar and rocking the 3-D H machine to ensure that no inadvertent exterior loads are applied in a vertical or fore and aft direction.
The feet of the 3-D H machine are not to be restrained or held during this step. If the feet change position, they should be allowed to remain in that attitude for the moment.
Carefully return the back pan to the seat-back and check the two spirits levels for zero position. If any movement of the feet has occurred during the rocking operation of the 3-D H machine, they must be repositioned as follows:
Alternately, lift each foot off the floor the minimum necessary amount until no additional foot movement is obtained. During this lifting, the feet are to be free to rotate; and no forward or lateral loads are to be applied. When each foot is placed back in the down position, the heel is to be in contact with the structure designed for this.
Check the lateral spirit level for zero position; if necessary, apply a lateral load to the top of the back pan sufficient to level the 3-D H machine’s seat pan on the seat.
4.13. Holding the T-bar to prevent the 3-D H machine from sliding forward on the seat cushion, proceed as follows:
(a) return the back pan to the seat-back;
(b) alternately apply and release a horizontal rearward load, not to exceed 25 N, to the back angle bar at a height approximately at the centre of the torso weights until the hip angle quadrant indicates that a stable position has been reached after load release. Care shall be exercised to ensure that no exterior downward or lateral loads are applied to the 3-D H machine. If another level adjustment of the 3-D H machine is necessary, rotate the back pan forward, re-level, and repeat the procedure from paragraph 4.12.
4.14. Take all measurements:
4.14.1. The co-ordinates of the “H” point are measured with respect to the three-dimensional reference system.
4.14.2. The actual torso angle is read at the back angle quadrant of the 3-D H machine with the probe in its fully rearward position.
4.15. If a re-run of the installation of the 3-D H machine is desired, the seat assembly should remain unloaded for a minimum period of 30 min prior to the re-run. The 3-D H machine should not be left loaded on the seat assembly longer than the time required to perform the test.
4.16. If the seats in the same row can be regarded as similar (bench seat, identical seats, etc.) only one “H” point and one “actual torso angle” shall be determined for each row of seats, the 3-D H machine described in appendix 1 to this annex being seated in a place regarded as representative for the row. This place shall be:
4.16.1. in the case of the front row, the driver’s seat;
4.16.2. in the case of the rear row or rows, an outer seat.
Annex 3 - Appendix 1
DESCRIPTION OF THE THREE DIMENSIONAL “H” POINT MACHINE
(3-D H machine)
1. Back and seat pans
The back and seat pans are constructed of reinforced plastic and metal; they simulate the human torso and thigh and are mechanically hinged at the “H” point. A quadrant is fastened to the probe hinged at the “H” point to measure the actual torso angle. An adjustable thigh bar, attached to the seat pan, establishes the thigh centreline and serves as a baseline for the hip angle quadrant.
2. Body and leg elements
Lower leg segments are connected to the seat pan assembly at the T-bar joining the knees, which is a lateral extension of the adjustable thigh bar. Quadrants are incorporated in the lower leg segments to measure knee angles. Shoe and foot assemblies are calibrated to measure the foot angle. Two spirit levels orient the device in space. Body element weights are placed at the corresponding centres of gravity to provide seat penetration equivalent to a 76 kg male. All joints of the 3-D H machine should be checked for free movement without encountering noticeable friction.
Figure 1 - 3-D H machine elements designation

Figure 2 - Dimensions of the 3-D H machine elements and load distribution

Annex 3 - Appendix 2
THREE-DIMENSIONAL REFERENCE SYSTEM
1. The three-dimensional reference system is defined by three orthogonal planes established by the vehicle manufacturer (see figure).
2. The vehicle measuring attitude is established by positioning the vehicle on the supporting surface such that the co-ordinates of the fiducial marks correspond to the values indicated by the manufacturer.
3. The co-ordinates of the “R” point and the “H” point are established in relation to the fiducial marks defined by the vehicle manufacturer.
Figure - Three-dimensional reference system

Annex 3 - Appendix 3
REFERENCE DATA CONCERNING SEATING POSITIONS
1. Coding of reference data
Reference data are listed consecutively for each seating position. Seating positions are identified by a two-digit code. The first digit is an Arabic numeral and designates the row of seats, counting from the front to the rear of the vehicle. The second digit is a capital letter which designates the location of the seating position in a row, as viewed in the direction of forward motion of the vehicle; the following letters shall be used:
L = left
C = centre
R = right
2. Description of vehicle measuring attitude
2.1. Co-ordinates of fiducial marks
X ...........................................
Y ...........................................
Z ...........................................
3. List of reference data
3.1. Seating position: ............................................
3.1.1. Co-ordinates of “R” point
X ...........................................
Y ...........................................
Z ...........................................
3.1.2. Design torso angle: .......................................
3.1.3. Specifications for seat adjustment
horizontal: ......................................
vertical : ......................................
angular : ......................................
torso angle: ......................................
Note: List reference data for further seating positions under 3.2., 3.3., etc
Annex 4
COLLISION TEST PROCEDURE
1. INSTALLATIONS
1.1. Testing ground
The test area shall be large enough to accommodate the mobile deformable barrier propulsion system and to permit after-impact displacement of the vehicle impacted and installation of the test equipment. The part in which vehicle impact and displacement occur shall be horizontal, flat and uncontaminated, and representative of a normal, dry, uncontaminated road surface.
2. TEST CONDITIONS
2.1. The vehicle to be tested shall be stationary.
2.2. The mobile deformable barrier shall have the characteristics set out in annex 5 to this Regulation. Requirements for the examination are given in the appendix to annex 5. The mobile deformable barrier shall be equipped with a suitable device to prevent a second impact on the struck vehicle.
2.3. The trajectory of the mobile deformable barrier longitudinal median vertical plane shall be perpendicular to the longitudinal median vertical plane of the impacted vehicle.
2.4. The longitudinal vertical median plane of the mobile deformable barrier shall be coincident within ± 25 mm with a transverse vertical plane passing through the R point of the front seat adjacent to the struck side of the tested vehicle. The horizontal median plane limited by the external lateral vertical planes of the front face shall be at the moment of impact within two planes determined before the test and situated 25 mm above and below the previously defined plane.
2.5. Instrumentation shall comply with ISO 6487:1987 unless otherwise specified in this Regulation.
2.6. The stabilised temperature of the test dummy at the time of the side impact test shall be 22 ± 4°C.
3. TEST SPEED
The mobile deformable barrier speed at the moment of impact shall be 50 ± 1 km/h. This speed shall be stabilised at least 0.5 m before impact. Accuracy of measurement: 1 per cent. However, if the test was performed at a higher impact speed and the vehicle met the requirements, the test shall be considered satisfactory.
4. STATE OF THE VEHICLE
4.1. General specification
The test vehicle shall be representative of the series production, shall include all the equipment normally fitted and shall be in normal running order. Some components may be omitted or replaced by equivalent masses where this omission or substitution clearly has no effect on the results of the test.
4.2. Vehicle equipment specification
The test vehicle shall have all the optional arrangements or fittings likely to influence the results of the test.
4.3. Mass of the vehicle
4.3.1. The vehicle to be tested shall have the reference mass as defined in paragraph 2.10. of this Regulation. The mass of the vehicle shall be adjusted to ± 1 per cent of the reference mass.
4.3.2. The fuel tank shall be filled with water to a mass equal to 90 per cent of the mass of a full load of fuel as specified by the manufacturer.
4.3.3. All the other systems (brake, cooling, etc.) may be empty; in this case, the mass of the liquids shall be offset.
4.3.4. If the mass of the measuring apparatus on board of the vehicle exceeds the 25 kg allowed, it may be offset by reductions which have no noticeable effect on the results of the test.
4.3.5. The mass of the measuring apparatus shall not change each axle reference load by more than 5 per cent, each variation not exceeding 20 kg.
5. PREPARATION OF THE VEHICLE.
5.1. The side windows at least on the struck side shall be closed.
5.2. The doors shall be closed, but not locked.
5.3. The transmission shall be placed in neutral and the parking brake disengaged.
5.4. The comfort adjustments of the seats, if any, shall be adjusted to the position specified by the vehicle manufacturer.
5.5. The seat containing the dummy, and its elements, if adjustable, shall be adjusted as follows:
5.5.1. The longitudinal adjustment device shall be placed with the locking device engaged in the position that is nearest to midway between the foremost and rearmost positions; if this position is between two notches, the rearmost notch shall be used.
5.5.2. The head restraint shall be adjusted such that its top surface is level with the centre of gravity of the dummy’s head; if this is not possible, the head restraint shall be in the uppermost position.
5.5.3. Unless otherwise specified by the manufacturer, the seat-back shall be set such that the torso reference line of the three-dimensional H point machine is set at an angle of 25 ± 1 towards the rear.
5.5.4. All other seat adjustments shall be at the mid-point of available travel; however, height adjustment shall be at the position corresponding to the fixed seat, if the vehicle type is available with adjustable and fixed seats. If locking positions are not available at the respective mid-points of travel, the positions immediately rearward, down, or outboard of the mid-points shall be used. For rotational adjustments (tilt), rearward will be the adjustment direction which moves the head of the dummy rearwards. If the dummy protrudes outside the normal passenger volume, eg. head into roof lining, then 1 cm clearance will be provided using: secondary adjustments, seat-back angle, or fore-aft adjustment in that order.
5.6. Unless otherwise specified by the manufacturer, the other front seats shall, if possible, be adjusted to the same position as the seat containing the dummy.
5.7. If the steering wheel is adjustable, all adjustments are positioned to their mid-travel locations.
5.8. Tyres shall be inflated to the pressure specified by the vehicle manufacturer.
5.9. The test vehicle shall be set horizontal about its roll axis and maintained by supports in that position until the side impact dummy is in place and after all preparatory work is complete.
5.10. The vehicle shall be at its normal attitude corresponding to the conditions set out in paragraph 4.3. above. Vehicles with suspension enabling their ground clearance to be adjusted shall be tested under the normal conditions of use at 50 km/h as defined by the vehicle manufacturer. This shall be assured by means of additional supports, if necessary, but such supports shall have no influence on the crash behaviour of the test vehicle during the impact.
6. SIDE IMPACT DUMMY AND ITS INSTALLATION
6.1. The side impact dummy shall comply with the specifications given in annex 6 and be installed in the front seat on the impact side according to the procedure given in annex 7 to this Regulation.
6.2. The safety-belts or other restraint systems, which are specified for the vehicle, shall be used. Belts should be of an approved type, conforming to Regulation No. 16 or to other equivalent requirements and mounted on anchorages conforming to Regulation No. 14 or to other equivalent requirements.
6.3. The safety-belt or restraint system shall be adjusted to fit the dummy in accordance with the manufacturer’s instructions; if there are no manufacturer’s instructions, the height adjustment shall be set at middle position; if this position is not available, the position immediately below shall be used.
7. MEASUREMENTS TO BE MADE ON THE SIDE IMPACT DUMMY
7.1. The readings of the following measuring devices are to be recorded.
7.1.1. Measurements in the head of the dummy
The resultant triaxial acceleration referring to the head centre of gravity. The head channel instrumentation shall comply with ISO 6487:1987 with:
CFC: 1000 Hz, and
CAC: 150 g
7.1.2. Measurements in the thorax of the dummy
The three thorax rib deflection channels shall comply with ISO 6487:1987
CFC: 1000 Hz
CAC: 6 mm
7.1.3. Measurements in the pelvis of the dummy
The pelvis force channel shall comply with ISO 6487:1987
CFC: 1000 Hz
CAC: 15 kN
7.1.4. Measurements in the abdomen of the dummy
The abdomen force channels shall comply with ISO 6487:1987
CFC: 1000 Hz
CAC: 5 kN
_________________
Annex 4 - Appendix l
DETERMINATION OF PERFORMANCE DATA
The required results of the tests are specified in paragraph 5.2. of this Regulation.
l. HEAD PERFORMANCE CRITERION (HPC)
When head contact takes place, this performance criterion is calculated for the total duration between the initial contact and the last instant of the final contact.
HPC is the maximum value of the expression:

where a is the resultant acceleration at the centre of gravity of the head in metres per second per second divided by 9.81 recorded versus time and filtered at channel frequency class 1000 Hz; t1 and t2 are any two times between the initial contact and the last instant of the final contact.
2. THORAX PERFORMANCE CRITERIA
2.1. Chest deflection: the peak chest deflection is the maximum value of deflection on any rib as determined by the thorax displacement transducers, filtered at channel frequency class 180 Hz.
2.2. Viscous criterion: the peak viscous response is the maximum value of VC on any rib which is calculated from the instantaneous product of the relative thorax compression related to the half thorax and the velocity of compression derived by differentiation of the compression, filtered at channel frequency class 180 Hz. For the purposes of this calculation the standard width of the half thorax rib cage is 140 mm.

where D (metres) = rib deflection
The calculation algorithm to be used is set out in annex 4, appendix 2.
3. ABDOMEN PROTECTION CRITERION
The peak abdominal force is the maximum value of the sum of the three forces measured by transducers mounted 39 mm below the surface on the crash side, CFC 600 Hz.
4. PELVIS PERFORMANCE CRITERION
The pubic symphisis peak force (PSPF) is the maximum force measured by a load cell at the pubic symphysis of the pelvis, filtered at channel frequency class 600 Hz.
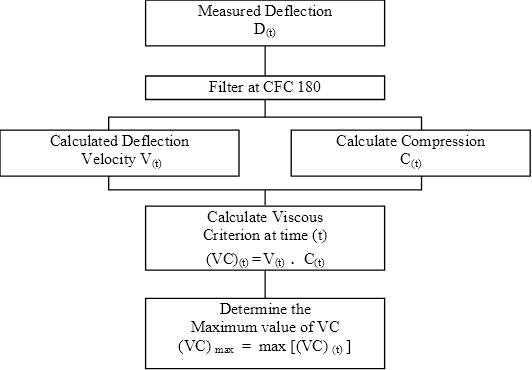
Annex 4 - Appendix 2
THE PROCEDURE FOR CALCULATING THE VISCOUS CRITERION FOR EUROSID 1
The Viscous Criterion, VC, is calculated as the instantaneous product of the compression and the rate of deflection of the rib. Both are derived from the measurement of rib deflection. The rib deflection response is filtered once at Channel Frequency Class 180. The compression at time (t) is calculated as the deflection from this filtered signal expressed as the proportion of the half width of the EUROSID l chest, measured at the metal ribs (0.14 metres):

The rib deflection velocity at time (t) is calculated from the filtered deflection as:

where D(t) is the deflection at time (t) in metres and at is the time interval in seconds between the measurements of deflection. The maximum value of t shall be 1.25 x 10-4 seconds.
This calculation procedure is shown diagrammatically below:
Annex 5
MOBILE DEFORMABLE BARRIER CHARACTERISTICS
1. CHARACTERISTICS OF THE BARRIER
1.1. The total mass shall be 950 ± 20 kg.
1.2. The front and rear track width of the trolley shall be 1,500 ± 10 mm.
1.3. The wheel base of the trolley shall be 3,000 ± 10 mm.
1.4. The centre of gravity shall be situated in the longitudinal median vertical plane within 10 mm, 1,000 ± 30 mm behind the front axle and 500 ± 30 mm above the ground.
1.5. The distance between the front face of the impactor and the centre of gravity of the barrier shall be 2,000 ± 30 mm.
2. CHARACTERISTICS OF THE IMPACTOR
2.1. Geometrical characteristics
2.1.1. The impactor consists of six independent joined blocks whose forms, sizes and positioning are shown in figure 1.
2.1.2. The deformable impact zone shall be 1,500 ± 10 mm wide and 500 ± 5 mm high.
2.1.3. The ground clearance of the collision zone shall be 300mm ± 5 mm measured in static condition before impact.
2.1.4. There shall be six deformable elements, divided into two rows of three elements. All the elements shall have the same width (500 ± 5 mm) and the same height (250 ± 3 mm); the elements of the upper row shall be 440 ± 5 mm deep and those of the lower row 500 ± 5 mm deep.
2.2. Material characteristics
The material of the impactor must be an aluminium honeycomb. Other materials can be used if equal results as described in paragraph 2.3. have been proved to the satisfaction of the Technical Service. In any case the type of impactor must be indicated in the test report.
2.3. Deformation characteristics
2.3.1. Deviation from the limits of the force-deflection corridors characterising the rigidity of the impactor - as defined in this annex, figure 2 - may be allowed provided that:
2.3.1.1. the deviation occurs after the beginning of the impact and before the deformation of the impactor is equal to 150 mm;
2.3.1.2. the deviation does not exceed 50 per cent of the nearest instantaneous prescribed limit of the corridor;
2.3.1.3. each displacement corresponding to each deviation does not exceed 35 mm of the deflection, and the sum of these displacements does not exceed 70 mm (see figure 2) and
2.3.1.4. the sum of the energy derived from deviating outside the corridor does not exceed 5 per cent of the gross energy for that block.
2.3.2. Parts 1 and 3 are identical. Their rigidity is such that their force-deflection curves fall within the hatched area of figure 2, graph 2a.
2.3.3. Parts 5 and 6 are identical. Their rigidity is such that their force-deflection curves fall within the hatched area of figure 2, graph 2d.
2.3.4. The rigidity of part 2 is such that its force-deflection curve falls within the hatched area of figure 2, graph 2b.
2.3.5. The rigidity of part 4 is such that its force-deflection curve falls within the hatched area of figure 2, graph 2c.
2.3.6. The force-deflection of the impactor as a whole shall fall within the hatched area of figure 2, graph 2e.
2.3.7. The force-deflection curves shall be verified by a test detailed in annex 5 - appendix, consisting of an impact of the assembly against a dynamometric barrier at 35 2 km/h.
2.3.8. The dissipated energy against parts 1 and 3 during the test shall be equal to 10 2 kJ for each of these parts.
2.3.9. The dissipated energy against parts 5 and 6 shall be equal to 3.5 1 kJ for each of these parts.
2.3.10. The dissipated energy against part 4 shall be equal to 4 ± 1 kJ.
2.3.11. The dissipated energy against part 2 shall be equal to 14 ± 2 kJ.
2.3.12. The total dissipated energy during the impact shall be equal to 45 ± 5 kJ.
2.3.13. Impactor deformation measured after the test level B (figure 1) shall be equal to 330 ± 20 mm.
Figure 1
Design of the mobile deformable barrier impactor

Figure 2
Force-deflection curves

Note: During the verification test, the loads measured on parts 1 and 3 and on parts 5 and 6 respectively shall not differ by more than 10 per cent for a given deflection
Annex 5 - Appendix
EXAMINATION OF THE MOBILE DEFORMABLE BARRIER
1. SCOPE
This appendix contains a prescription for the examination of the mobile deformable barrier. The test authority is responsible for the mobile deformable barrier meeting the specifications using a test against a dynamometric wall supported by a fixed rigid barrier.
2. INSTALLATION
2.1. Testing ground
The test area shall be large enough to accommodate the run-up track of the mobile deformable barrier, the rigid barrier and the technical equipment necessary for the test. The last part of the track, for at least 5 m before the rigid barrier, shall be horizontal, flat and smooth.
2.2. Fixed rigid barrier and dynamometric wall
2.2.1. The rigid barrier shall consist of a block of reinforced concrete not less than 3 m wide in front and not less than 1.5 m high. The thickness of the rigid barrier shall be such that it weighs at least 70 tonnes. The front face shall be vertical, perpendicular to the axis of the run-up track and covered with load cells capable of measuring the total load on each part of the mobile deformable barrier impactor at the moment of impact. The impact plate area centres shall align with those of the chosen mobile deformable barrier; their edges shall clear adjacent areas by 20 mm. Cell mounting and plate surfaces shall be in accordance with the requirements set out in the annex to ISO 6487:1987. In cases where surface protection is added, it shall not degrade the transducer responses.
2.2.2. The rigid barrier shall be either anchored in the ground or placed on the ground with, if necessary, additional arresting devices to limit its displacement. A rigid barrier with load cells having different characteristics but giving results that are at least equally conclusive may be used.
3. PROPULSION OF THE MOBILE DEFORMABLE BARRIER
At the moment of impact the mobile deformable barrier shall no longer be subject to the action of any additional steering or propelling device. It shall reach the obstacle on a course perpendicular to the collision barrier. Impact alignment shall be accurate to within 10 mm.
4. MEASURING INSTRUMENTS
4.1. Speed
The impact speed shall be 35 +2 -2 km/h. The instrument used to record the speed on impact shall be accurate to within one per cent.
4.2. Loads
Measuring instruments shall meet the specifications set forth in ISO 6487-1987
CFC for all blocks = 60 Hz
CAC for blocks 1 and 3 = 120 kN
CAC for blocks 4, 5 and 6 = 60 kN
CAC for block 2 = 140 kN
4.3. Acceleration
The acceleration in the longitudinal direction shall be measured at a place not subject to bending. The instrumentation shall comply with ISO 6487:1987 with the following specifications:
CFC 1000 Hz (before integration)
CFC 60 Hz (after integration)
CAC 50 g
5. GENERAL SPECIFICATION OF BARRIER
5.1. The individual characteristics of each barrier shall comply with paragraph 1 of annex 5 and shall be recorded.
6. GENERAL SPECIFICATION OF THE IMPACTOR TYPE
6.1. The suitability of an impactor type shall be confirmed when the outputs from the six load cells each produce signals complying with the requirements indicated in annex 5, paragraph 2.2. to this Regulation when recorded.
6.2. Impactors shall carry consecutive serial numbers including the date of manufacture.
Annex 6
TECHNICAL DESCRIPTION OF THE SIDE IMPACT DUMMY
1. GENERAL
1.1. The dimensions and masses of the side impact dummy represent a 50th percentile adult male, without lower arms.
1.2. The side impact dummy consists of a metal and plastic skeleton covered by flesh-simulation rubber. Plastic and foam.
1.3. The side impact dummy prescribed in this Regulation, including the instrumentation and calibration, is described in technical drawings and a user’s manual.
2. CONSTRUCTION
2.1. For an overview of the side impact dummy see figure 1 and table 1 of this annex.
2.2. Head
2.2.1. The head is shown as part No. 1 in figure 1 of this annex.
2.2.2. The head consists of an aluminium shell covered by a pliable vinyl skin. The interior of the shell is a cavity accommodating triaxial accelerometers and ballast.
2.3. Neck
2.3.1. The neck is shown as part No. 2 in figure 1 of this annex.
2.3.2. The neck consists of a head/neck interface piece, a neck/thorax interface piece and a central section that links the two interfaces to one another.
2.3.3. The head/neck interface piece (part No. 2a) and the neck/thorax interface piece (part No. 2c) both consist of two aluminium disks linked together by means of a half spherical screw and eight rubber buffers.
2.3.4. The cylindrical central section (part No. 2b) is made of rubber.
2.3.5. The neck is mounted on the neck-bracket, shown as part No. 3 in figure 1 of this annex.
2.3.6. The angle between the two faces of the neck-bracket is 25 degrees. Because the shoulder block is inclined 5 degrees backwards, the resulting angle between the neck and torso is 20 degrees.
2.4. Shoulder
2.4.1. The shoulder is shown as part No. 4 in figure 1 of this annex.
2.4.2. The shoulder consists of a shoulder block, two clavicles and a shoulder cap.
2.4.3. The shoulder block (part No. 4a) consists of an aluminium spacer block, an aluminium plate on top and an aluminium plate on the bottom of the spacer block.
2.4.4. The clavicles (part No. 4b) are made of polypropylene. The clavicles are held back in their neutral position by two elastic cords (part No. 4c) which are clamped to the rear of the shoulder block. The outer edge of both clavicles accommodates a design allowing for standard arm positions.
2.4.5. The shoulder cap (part No. 4d) is made of low-density polyurethane foam and is attached to the shoulder block.
2.5. Thorax
2.5.1. The thorax is shown as part No. 5 in figure l of this annex.
2.5.2. The thorax consists of a rigid thoracic spine box and three identical rib modules.
2.5.3. The thoracic spine box (part No. 5a) is made of steel. On the rear surface a lead-filled plastic back plate is mounted (part No. 5b).
2.5.4. The top surface of the thoracic spine box is inclined 5 degrees backwards.
2.5.5. A rib module (part No. 5c) consists of a steel rib covered by a flesh-simulating polyurethane foam (part No. 5d), a piston-cylinder assembly (part No. 5e) linking the rib and spine box together, a hydraulic damper (part No. 5f) and a stiff damper spring (part No. 5g)
2.5.6. In the piston-cylinder assembly is a tuning spring (part No. 5h).
2.5.7. A displacement transducer (part No. 5i) can be mounted on the front face of the cylinder and connected to the inside of the rib.
2.6. Arms
2.6.1. The arms are shown as part No. 6 in figure 1 of this annex.
2.6.2. The arms have a plastic skeleton covered by a polyurethane ‘flesh’ and a PVC skin.
2.6.3. The shoulder/arm joint allows for discrete arm positions at 0°, 40° and 90° to the torso line.
2.6.4. The shoulder/arm joint allows for a flexion/extension rotation only.
2.7. Lumbar spine
2.7.1. The lumbar spine is shown as part No. 7 in figure 1 of this annex.
2.7.2. The lumbar spine consists of a solid rubber cylinder with two steel interface plates at each end, and a steel cable inside the cylinder.
2.8. Abdomen
2.8.1. The abdomen is shown as part No. 8 in figure 1 of this annex.
2.8.2. The abdomen consists of a metal casting and a polyurethane foam covering.
2.8.3. The central part of the abdomen is a metal casting (part No. 8A). A cover plate is mounted on top of the casting.
2.8.4. The covering (part No. 8b) is made of polyurethane foam. A curved slab of rubber filled with lead-pellets is integrated in the foam covering at both sides.
2.8.5. Between the foam covering and the rigid casting at each side of the abdomen, either three force transducers (part No. 8c) or three non-measuring “dummy” units can be mounted.
2.9. Pelvis
2.9.1. The pelvis is shown as part No. 9 in figure 1 of this annex.
2.9.2. The pelvis consists of a sacrum block, two iliac wings, two hip joints and a foam covering.
2.9.3. The sacrum (part No. 9a) consists of a lead-filled aluminium block and an aluminium plate mounted on top of this block.
2.9.4. The iliac wings (part No. 9b) are made of polyurethane.
2.9.5. The hip joints (part No. 9c) are made of steel. They consist of an upper femur block and a ball joint connected to an axle passing through the dummy’s H-point.
2.9.6. The flesh system (part No. 9d) is made of a PVC skin filled with polyurethane foam. At the H-point location the skin is replaced by a large open-cell polyurethane foam cylinder (part No. 9e), attached to a steel plate fixed on the iliac wing by an axle going through the ball joint.
2.9.7. The iliac wings are linked together at the pubic symphysis by a force transducer (part No . 9f) or a “dummy” transducer.
2.10. Legs
2.10.1. The legs are shown as part No. 10 in figure 1 of this annex.
2 10.2. The legs consist of a metal skeleton covered by a flesh-simulating polyurethane foam and a plastic skin.
2.10.3. The knee and ankle joint allow for a flexion/extension rotation only.
2.11. Suit
2.11.1. The suit is shown as part No. 11 in figure 1 of this annex.
2.11.2. The suit is made of rubber and covers the shoulders, thorax, upper part of the arms, the abdomen and lumbar spine, the upper part of the pelvis.
Figure 1. CONSTRUCTION OF SIDE IMPACE DUMMY

Table 1 - Side Impact Dummy Components
Part | No. | Description | Number |
1 | | Head | 1 |
2 | | Neck | 1 |
| 2a | Head/neck interface | 1 |
| 2b | Central section | 1 |
| 2c | Neck/thorax interface | 1 |
3 | | Neck-bracket | 1 |
4 | | Shoulder | 1 |
| 4a | Shoulder block | 1 |
| 4b | Clavicles | 2 |
| 4c | Elastic cord | 2 |
| 4d | Shoulder cap | 1 |
5 | | Thorax | 1 |
| 5a | Thoracic spine | 1 |
| 5b | Back plate | 1 |
| 5c | Rib module | 3 |
| 5d | Rib covered with flesh | 3 |
| 5e | Piston-cylinder assembly | 3 |
| 5f | Damper | 3 |
| 5g | Damper spring | 3 |
| 5h | Tuning spring | 3 |
| 5i | Displacement transducer | 3 |
6 | | Arm | 2 |
7 | | Lumber spine | 1 |
8 | | Abdomen | 1 |
| 8a | Central casting | 1 |
| 8b | Flesh covering | 1 |
| 8c | Force transducer | 3 |
9 | | Pelvis | 1 |
| 9a | Scarum block | 1 |
| 9b | Iliac wing | 2 |
| 9c | Hip joint | 2 |
| 9d | Flesh covering | 1 |
| 9e | H-point foam block | 2 |
| 9f | Force transducer | 1 |
10 | | Leg | 2 |
11 | | Suit | 1 |
3. ASSEMBLY OF THE DUMMY
3.1. Head-neck
3.1.1. The required torque on the half spherical screws for assembly of the neck is 10 Nm.
3.1.2. The head is mounted to the head-neck interface plate of the neck by three screws.
3.1.3. The neck-thorax interface plate of the neck is mounted to the neck-bracket by four screws.
3.2. Neck-shoulder-thorax
3.2.1. The neck-bracket is mounted to the shoulder block by four screws.
3.2.2. The shoulder-block is mounted to the top-surface of the thoracic spine box by three screws.
3.3. Shoulder-arm
3.3.1. The arms may be mounted to the shoulder clavicles and adjusted by means of a screw and a bearing. The required torque to hold the arm in the defined standard position is 0.6 Nm.
3.4. Thorax-lumbar spine-abdomen
3.4.1. A lumbar spine adaptor is mounted by two screws to the lower part of the thoracic spine.
3.4.2. The lumbar spine adaptor is mounted to the top of the lumbar spine by two screws.
3.4.3. The top flange of the central abdominal casting is clamped between the lumbar spine adaptor and the lumbar spine.
3.5. Lumbar spine-pelvis-legs
3.5.1. The lumbar spine is mounted to the lumbar spine bottom plate by three screws.
3.5.2. The lumbar spine bottom plate is mounted to the sacrum block of the pelvis by three screws.
3.5.3. The legs are mounted to the upper femur - hip joint of the pelvis by a screw.
3.5.4. The legs may be assembled and adjusted by means of hinge joints in the knees and ankles.
4. MAIN CHARACTERISTICS
4.1. Mass
4.1.2. The masses of the main dummy components are presented in table 2 of this annex
Table 2 - Dummy Component Masses
Component | Mass (kg) | Principal Contents |
Head | 4.0 0.4 | Complete head including triaxial accelerometer |
| | |
Neck | 1.0 0.1 | Neck, not including neck-bracket |
| | |
Thorax | 22.4 1.5 | Neck bracket, shoulders, arm attachment bolts, spine box, spine back plate, rib modules, rib deflection transducers, lumbar spine adaptor, shoulder cap, abdomen central casting, abdomen force transducers, 2/3 of suit |
| | |
Arm | 1.3 0.1 | Upper arm, including arm positioning plate (each) |
| | |
| | |
Abdomen | 5.0 0.5 | Abdomen flesh covering and lumbar spine |
| | |
| | |
Pelvis | 12.0 1.0 | Sacrum block, lumbar spine bottom plate, hip ball joints, upper femurs, iliac wings, pubic force transducer, pelvis flesh covering, 1/3 of suit. |
| | |
Leg | 12.5 1.0 | Foot, lower and upper leg and flesh as far as junction with upper femur (each). |
| | |
Total | 72.0 0.5 | |
4.2. Principal dimensions
4.2.1. The principal dimensions of the side impact dummy (including the suit), based on figure 2 of this annex, are given in table 3 of this annex.
Figure 2 - Measurements for principal dummy dimensions (see table 3)
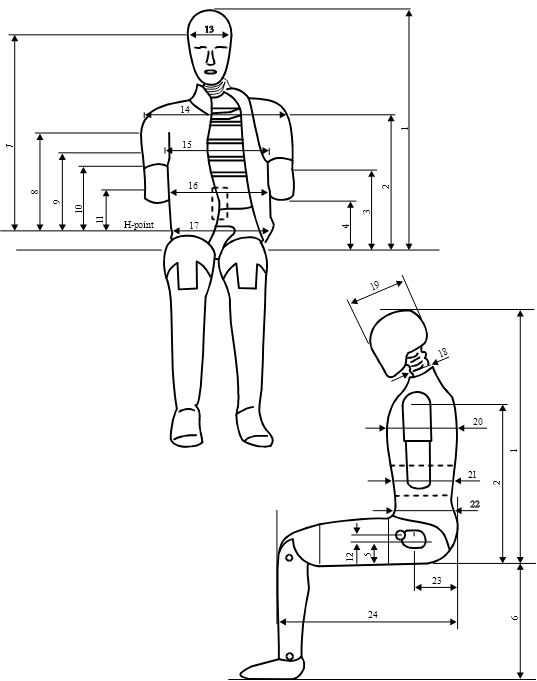
Table 3 - Principal Dummy Dimensions
No. | Parameter | Dimension (mm) |
1 | Sitting height | 904 7 |
2 | Seat to shoulder joint | 557 5 |
3 | Seat to bottom lower rib | 357 5 |
4 | Seat to arm | 242 5 |
5 | Seat to H-point | 98 2 |
6 | Sole to seat, sitting | 456 5 |
7 | H-point to head c.o.g. | 687 5 |
8 | H-point to centre upper rib | 393 3 |
9 | H-point to centre middle rib | 337 3 |
10 | H-point to centre lower rib | 281 3 |
11 | H-point to centre abdominal force transducer | 180 3 |
12 | H-point to centre pubic symphysis force transducer | 14 2 |
13 | Head width | 154 2 |
14 | Shoulder/arm width | 482 5 |
15 | Thorax width | 330 5 |
16 | Abdomen width | 290 5 |
17 | Pelvis width | 355 5 |
18 | Neck diameter | 80 2 |
19 | Head depth | 201 5 |
20 | Thorax depth | 276 5 |
21 | Abdomen depth | 204 5 |
22 | Pelvis depth | 245 5 |
23 | Back of buttocks to H-point | 157 2 |
24 | Back of buttocks to front knee | 610 5 |
5. CERTIFICATION OF THE DUMMY
5.1. Impact side
5.1.1. Depending on the vehicle side to be impacted, dummy parts should be certified on the left hand side or right hand side.
5.1.2. The configurations of the rib modules (including instrumentation), the abdominal force transducers and the pubic symphysis transducer have to be converted to the required impact side.
5.2. Instrumentation
All instrumentation shall be calibrated in compliance with the requirements of the documentation specified in paragraph 1.3.
5.2.1. All instrumentation channels shall comply with ISO 6487 : 1987.
5.3. Visual check
5.3.1. All dummy parts should be visually checked for damage and if necessary be replaced before the certification test.
5.4. General test set-up
5.4.1. Figure 3 of this annex shows the test set-up for all certification tests on the side impact dummy.
5.4.2. The tests on the head, neck, thorax and lumbar spine are carried out on disassembled parts of the dummy.
5.4.3. The tests on the shoulder, abdomen and pelvis are performed with the complete dummy (without suit). In these tests the dummy is seated on a flat surface with two sheets of less than or equal to 2 mm thick Teflon, placed between the dummy and the surface.
5.4.4. All parts to be certified should be kept in the test room for a period of at least four hours at a temperature between 18°C and 22°C prior to a test.
5.4.5. The time between two repeated certification tests should be at least 30 minutes.
5.5. Head
5.5.1. The head is dropped from 200 1 mm onto a flat, rigid impact surface.
5.5.2. The angle between the impact surface and the midsagittal plane of the head is 35° 1° allowing an impact of the upper-side of the head.
5.5.3. The peak resultant head acceleration, filtered using CFC 1000, should be between 100 g and 150 g.
5.5.4. The head performance can be adjusted to meet the requirement by altering the friction characteristics of the flesh-skull interface (eg. by lubrication with talcum powder or PTFE spray).
5.6. Neck
5.6.1. The head-neck interface of the neck is mounted to a special symmetrical certification headform with a mass of 3.9 0.05 kg (see figure 4).
5.6.2. The headform and neck are mounted upside-down to the bottom of a neck-bending pendulum allowing a lateral motion of the system.
5.6.3. The neck-pendulum is equipped with a uniaxial accelerometer mounted at 1,655 5 mm from the pendulum pivot.
5.6.4. The neck-pendulum should be allowed to fall freely from a height chosen to achieve an impact velocity of 3.4 0.1 m/s measured at the accelerometer location.
5.6.5. The neck-pendulum is decelerated from impact velocity to zero by an appropriate device, resulting in a deceleration-time history inside the corridor specified in figure 5 of this annex. All channels have to be recorded using ISO CFC 1000 filters and filtered digitally using CFC 60.
5.6.6. The maximum headform flexion angle relative to the pendulum should be 51 5 degrees and should occur between 50 and 62 ms.
5.6.7. The maximum headform centre of gravity displacements in the lateral and vertical direction should be 97 10 mm and 26 6 mm respectively.
5.6.8. The neck performance can be adjusted by replacing the circular section buffers with buffers of a different shore hardness.
5.7. Shoulder
5.7.1. The length of the elastic cord should be adjusted so that a force between 27.5 N and 32.5 N applied in a forward direction 4 1 mm from the outer edge of the clavicle in the same plane as the clavicle movement, is required to move the clavicle forward.
5.7.2. The dummy is seated on a flat, horizontal, rigid surface with no back support. The thorax is positioned vertically and the arms should be set at an angle of 40° 2° forward to the vertical. The legs are positioned horizontally.
5.7.3. The impactor is a pendulum of 23.5 - 0.0/+ 0.2 kg and 152 2 mm diameter. The impactor is suspended from a rigid support by four wires with the centre line of the impactor at least 3.5 m below the rigid support.
5.7.4. The impactor is equipped with an accelerometer sensitive in the direction of impact and located on the impactor axis.
5.7.5. The impactor should freely swing onto the shoulder of the dummy with an impact velocity of 4.3 0.1 m/s.
5.7.6. The impact direction is perpendicular to the anterior-posterior axis of the dummy and the axis of the impactor coincides with the axis of the upper arm pivot.
5.7.7. The peak acceleration of the impactor, filtered using CFC 180, should be between 7.5 and 10.5 g.
5.8. Arms
5.8.1. No dynamic certification procedure is defined for the arms.
5.9. Thorax
5.9.1. Each rib module is certified separately.
5.9.2. The rib module is positioned vertically in a drop test rig and the rib cylinder is clamped rigidly onto the rig.
5.9.3. The impactor is a free fall mass of 7.8 - 0.0/+ 0.1 kg with a flat face and a diameter of 150 2 mm.
5.9.4. The centre line of the impactor should be aligned with the centre line of the rib’s piston.
5.9.5. The impact velocity is 1.0, 2.0, 3.0 and 4.0 m/s respectively. Impact velocities should not vary from those specified by more than 2 per cent.
5.9.6. The rib displacement should be measured, for instance using the rib’s own displacement transducer.
5.9.7. The rib certification requirements are shown in table 4 of this annex.
5.9.8. The performance of the rib module can be adjusted by replacing the tuning spring inside the cylinder with one of a different stiffness.
Table 4 - Certification requirements for the full rib module |
Impact Velocity (m/s) | | Displacement (mm) |
| | Minimum | Maximum |
1.0 | | 10.0 | 14.0 |
2.0 | | 23.5 | 27.5 |
3.0 | | 36.0 | 40.0 |
4.0 | | 46.0 | 51.0 |
5.10. Lumbar spine
5.10.1. The lumbar spine is mounted to the special symmetrical certification headform with a mass of 3.9 0.05 kg (see figure 4).
5.10.2. The headform and lumbar spine are mounted upside-down to the bottom of a neck-bending pendulum allowing a lateral motion of the system.
5.10.3. The neck-pendulum is equipped with a uniaxial accelerometer mounted at 1,655 5 mm from the pendulum pivot.
5.10.4. The neck-pendulum should be allowed to fall freely from a height chosen to achieve an impact velocity of 6.05 0.1 m/s measured at the accelerometer location.
5.10.5. The neck-pendulum is decelerated from impact velocity to zero by an appropriate device, resulting in a deceleration-time history inside the corridor specified in figure 6 of this annex. All channels have to be recorded using ISO 6487 CFC 1000 filters and filtered digitally using CFC 60.
5.10.6. The maximum headform flexion angle relative to the pendulum should be 50 5 degrees and should occur between 39 and 53 ms.
5.10.7. The maximum headform centre of gravity displacements in the lateral and vertical direction should be 104 7 mm and 33 7 mm respectively.
5.10.8. The performance of the lumbar spine can be adjusted by changing the length of the spine.
5.11. Abdomen
5.11.1. The dummy is seated on a flat, horizontal, rigid surface with no back support. The thorax is positioned vertically, while the arms and legs are positioned horizontally.
5.11.2. The impactor is a pendulum of 23.5 - 0.0/+0.2 kg and 152 2 mm diameter.
5.11.3. The pendulum is equipped with a horizontal arm rest impactor face of 1.0 0.01 kg. The total mass of the impactor with the arm rest face is 24.5 - 0.0/+0.2 kg. The rigid arm rest is 70 1 mm high, 150 1 mm wide and should be allowed to penetrate at least 60 mm into the abdomen. The centreline of the pendulum coincides with the centre of the arm rest.
5.11.4. The impactor is equipped with an accelerometer sensitive in the direction of impact and located on the impactor axis.
5.11.5. The impactor should freely swing onto the abdomen of the dummy with an impact velocity of 6.3 0.1 m/s.
5.11.6. The impact direction is perpendicular to the anterior-posterior axis of the dummy and the axis of the impactor is aligned with the centre of the middle force transducer.
5.11.7. The peak force of the impactor, obtained from the impactor acceleration filtered using CFC 180 and multiplied by the impactor/armrest mass, should be between 9.5 and 11.1 kN, and occur between 9.8 and 11.4 ms.
5.11.8. The force-time histories measured by the three abdominal force transducers must be summed and filtered using CFC 600. The peak force of this sum should be between 5.9 and 7.9 kN.
5.12. Pelvis
5.12.1. The dummy is seated on a flat, horizontal, rigid surface with no back support. The thorax is positioned vertically while the arms and legs are positioned horizontally.
5.12.2. The impactor is a pendulum of 23.5 - 0.0/+0.2 kg and 152 2 mm diameter.
5.12.3. The impactor is equipped with an accelerometer sensitive in the direction of impact and located on the impactor axis.
5.12.4. The impactor should freely swing onto the pelvis of the dummy with an impact velocity of 4.3 0.1 m/s.
5.12.5. The impact direction is perpendicular to the anterior-posterior axis of the dummy and the axis of the impactor is aligned with the centre of the H-point foam cylinder.
5.12.6. The peak force of the impactor, obtained from the impactor acceleration filtered using CFC 180 and multiplied by the impactor mass, should be between 4.4 and 5.4 kN, and occur between 10.3 and 15.5 ms
5.12.7. The pubic symphisis force, filtered using CFC 600, should be between 1.04 and 1.64 kN and occur between 9.9 and 15.9 ms.
5.13. Legs
5.13.1. No dynamic certification procedure is defined for the legs.

Figure 3 - OVERVIEW OF THE SIDE IMPACT DUMMY CERTIFICATION TEST SET-UP
Figure 4 - NECK AND LUMBAR SPINE CERTIFICATION TEST SET-UP

Figure 5 - PENDULUM DECELERATION-TIME CORRIDOR FOR NECK CERTIFICATION NECK


Annex 7
INSTALLATION OF THE SIDE IMPACT DUMMY
1. GENERAL
1.1. The side impact dummy to be used for the following installation procedure is described in annex 6 of this regulation.
2. INSTALLATION
2.1. Adjust the leg joints so that they just support the leg when it is extended horizontally (1 to 2 g).
2.2. Clothe the dummy in form-fitting cotton stretch underwear with short sleeves and mid-calf length pants. Each foot is equipped with a shoe.
2.3. Place the dummy in the outboard front seat of the impacted side as described in the side impact test procedure specification.
2.4. The plane of symmetry of the dummy shall coincide with the vertical median plane of the specified seating position.
2.5. The pelvis of the dummy shall be positioned such that a lateral line passing through the dummy H-points is perpendicular to the longitudinal centre plane of the seat. The line through the dummy H-points shall be horizontal with a maximum inclination of 2 degrees.
2.6. The upper torso shall be bent forward and then laid back firmly against the seat back. The shoulders of the dummy shall be set fully rearward.
2.7. Irrespective of the seating position of the dummy, the angle between the upper arm and the torso arm reference line on each side shall be 40° 5°. The torso arm reference line is defined as the intersection of the plane tangential to the front surface of the ribs and the longitudinal vertical plane of the dummy containing the arm.
2.8. For the driver's seating position, without inducing pelvis or torso movement, place the right foot of the dummy on the undepressed accelerator pedal with the heel resting as far forward as possible on the floorpan. Set the left foot perpendicular to the lower leg with the heel resting on the floorpan in the same lateral line as the right heel. Set the knees of the dummy such that their outside surfaces are 150 10 mm from the plane of symmetry of the dummy. If possible within these constraints place the thighs of the dummy in contact with the seat cushion.
2.9. For other seating positions, without inducing pelvis or torso movement, place the heels of the dummy as far forward as possible on the floorpan without compressing the seat cushion more than the compression due to the weight of the leg. Set the knees of the dummy such that their outside surfaces are 150 10 mm from the plane of symmetry of the dummy.
_____________________________________
For details of the construction of the 3-D H machine refer to Society of Automobile Engineers (SAE), 400 Commonwealth Drive, Warrendale, Pennsylvania 15096, United States of America.